


공동학과
공동학과

공동학과는 한국생산기술연구원(KITECH)과 한양대학교(HYU) 양기관이 협력 하여 한양대학교(ERICA)에 설치한 일반대학원입니다. 전공분야는 지능로봇분야, 기계융합-3D프린딩분야, 첨단소재분야, 제조서비스융합분야의 미래를 선도할 학문들이 융합된 교육과정으로 구성되어 있으며, 양기관의 교수진이 공동으로 교육과 연구를 통해서 지도하여 이론과 연구현장실무를 겸비한 고급전문인력 양성을 목표로 합니다.
-
전공소개
-
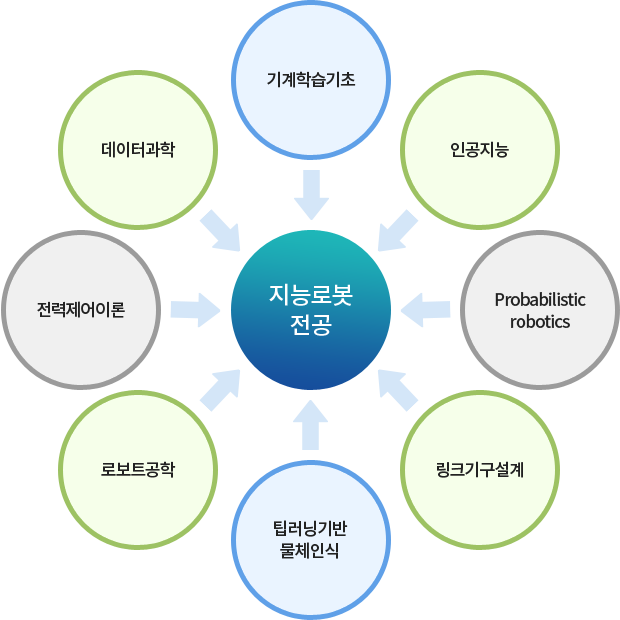
지능로봇전공(Major in Intelligent Robotics)
-
인간의 삶을 위한 로봇기술의 전문인력배양을 위한 기계, 전기·전자, 컴퓨터, 인공지능, 빅테이터 등 정보기술(IT)가 복합된 다학제적 전공으로 로봇메카니즘, 제어, 인공지능, 데이터과학, 딥러닝기반 물체인식, Probabilistic robotics, 링크기구설계 등을 교육과 연구를 통해 학습합니다.
-
-
-
-
기계융합·3D프린팅전공(Major in MachineryConvergence and 3D Printing)
-
기계융합·3D프린팅전공은 핵심 기계기술의 융합화, 제조기술의 디지털 플랫폼, 3D프린팅 혁신, 사이버-물리시스템의 조기 정착을 위한 전문인력 배양을 목표로 응용과학 및 레이저가공, 박판성형이론 및 전산해석, 스트레스 및 고장분석,제조시스템 플랫폼,멀티스케일전산역학, 나노공정개론,다중물리해석,3D 프린팅설계 등을 중심으로 교육과 연구를 통해 학습합니다.
-
-
-
산업시스템전공(Major in Industrial Systems)
-
산업시스템전공은 한양대 경영학부 및 산업공학과 교수님들과 생산기술연구원 국가산업융합지원센터의 박사님들이 제조, 신제품, 서비스, IT 기반의 혁신 비즈니스 창출을 위한 연구와 교육을 수행합니다.
-
-
-
첨단소재전공(Major in Materials Science andEngineering)
-
첨단소재전공은 반도체, 표면처리, 박막공학, 레이저가공학, 전기화학특론, 나노화학공정기반 신기능소재, 첨단바이오소재 등을 교육과 연구를 통해 학습합니다.
-
-

-
공동학과 (석사/박사/통합과정)
구분 학점이수 현장연구 학위논문 학위수여 한양대학교 
공동 공동 생기원 
-
선발절차
-

 모집공고
모집공고
(한양대학교) -
 대학 서류심사
대학 서류심사
-
 대학 & 생기원
대학 & 생기원
면접심사 -
 합격자 발표
합격자 발표
-
 공동지도교수 매칭
공동지도교수 매칭
(한양대 OR 생기원 선택) -
 입학 및 입소
입학 및 입소
-
-
장학제도
기관 조건 지원내용 한양대 일반대학원 공동학과 석사, 박사, 석박사통합과정 합격자
입학 후 매학기 3.75이상 유지필요
※ KITECH간의 공동학과 설치 협약 유효기간동안 적용
등록금 100% 지원(입학금제외)
- 석사, 박사과정, 석사과정⇨통합과정 전환자 : 1-4기(4회)
- 석박사통합과정 : 1-6기(6회)※ 단, 석박사통합과정⇨석사과정 전환자 다음학기부터 장학금 지원 중단
일반대학원 공동학과 석사, 박사, 석박사통합과정 재학생
연구과제 참여를 통한 생활비 지원
-
지원자격
-
석.박사 통합과정/석사과정
-
학사학위 소지자 또는 입학일 전까지 학사학위 취득 예정인 자
-
법령에 의하여 학사학위 이상의 자격이 있다고 인정되는 자
-
박사과정
-
석사학위 소지자 또는 입학일 전까지 석사학위 취득 예정인 자
-
법령에 의하여 석사학위 이상의 자격이 있다고 인정되는 자
-